Low-cost Electronic System for Accident Detection in Two-wheelers
The Smart City Research Lab at the International Institute of Information Technology (IIIT) Hyderabad developed a hardware system that aims to assist in driving with ease and to reduce accidents. The system is expected to be a low-cost, low-footprint device that can be attached retrospectively to any bike. The system includes an accelerometer, GPS, gyroscope, and environmental sensors for continuous monitoring of the vehicle. The data is communicated to the cloud through BLE (smartphone link) or using LTE networks. The data from these sensors is then used to train machine learning algorithms to determine various scenarios such as bike accidents, turning, stoppage and so on. This work is just the beginning of a more comprehensive vision.
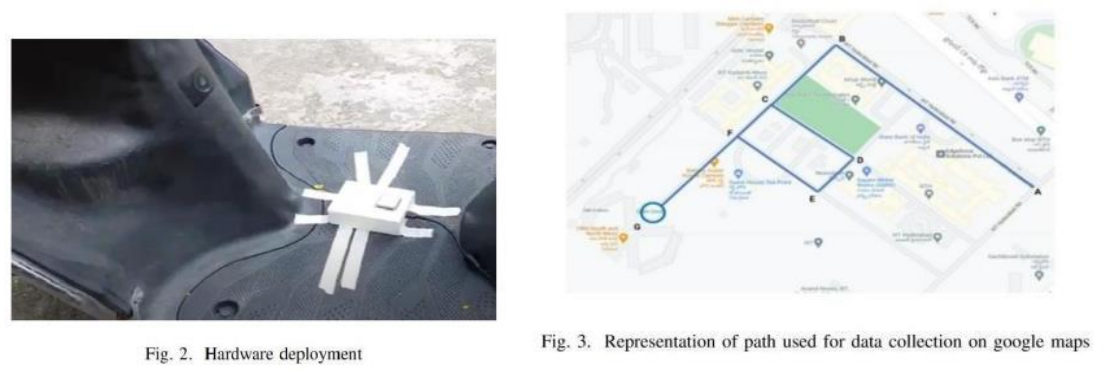
The data is collected for various driving events from the hardware system deployed on the motorcycle, as shown in Fig:2. The data from the accelerometer and gyroscope sensors is continuously logged by the SD card. Simultaneously, the entire ride is video recorded with the help of a camera. Later, by matching the timestamps between the sensor data and the video, the dataset is labeled manually. The dataset consists of 7 features, namely Ax, Ay, Az (accelerometer data on the x, y and z-axis), Gx, Gy, Gz (Gyroscope data on the x, y and z-axis) and speed. The sampling rate of the sensors is 104 Hz. Five driving events, such as Left Turn (LT), Right Turn (RT), Straight Line (SL), Speed Bump (SB), and Stop (ST) are performed. A Honda Activa motorcycle is used for collecting the data and Fig:3 shows the path followed. This route is selected because this particular path covers all the events and is relatively safe to collect the data.
Detailed analysis of results indicating contributions made towards increasing the state of knowledge in the subject is as follows. Various machine learning (ML) models are implemented to understand the capabilities of each of these models with respect to classifying different driving events. A thorough investigation of various machine learning algorithms that are being used in state-of-art, such as K- Nearest Neighbour (KNN), Support Vector classifier (SVC), Decision Trees (DT), Random Forest (RF) and Naive Bayes (NB) is also done. Though the accuracies of these models are decent, the class-wise accuracy is pretty low compared to the overall accuracy, which was further investigated. Especially, in the case of events like “Left Turn” and “Bump,” the accuracies are fairly low, one reason being that the dataset is unbalanced. When the vehicle is in motion, there will be some changes in kinematic states such as acceleration, deceleration, angular velocity, etc., of the vehicle while performing certain actions like turns, braking, etc. Neural network models can be trained to capture these transitions. Therefore, a time-series classification model using LSTM which will mitigate this problem is proposed. Time series classification data differs from a regular classification problem since the attributes have an ordered sequence. This work used LSTM to perform the time series classification. The reason for choosing LSTM for sequence classification is that it can learn from the raw time series data directly and does not require domain expertise to engineer input features manually. LSTM is a type of recurrent neural network but is better than traditional recurrent neural networks in terms of memory. LSTMs have a good hold over memorizing internal representation of the time series data and ideally achieve better performance.
The development of an electronic system that can monitor the parameters associated with motorbike driving to determine various scenarios aims to assist in driving and reducing accidents. The system can be deployed on a two-wheeler to collect the dataset with various parameters like acceleration, angular velocity, and speed. Various machine-learning models have been applied to the collected dataset to classify certain driving events. However, it was identified that though the overall accuracy of these models is decent, the class-wise accuracies are not up to the mark. Hence, a time- series-based classification model that mitigates the problems persisting in these machine-learning models was proposed. The experimental study indicates that the proposed LSTM model outperforms the other models not only w.r.t to overall accuracy but also w.r.t class-wise accuracies. The future work aims to classify several other critical driving events like falls/accidents, swerving, swaying, wobbling, toppling, etc., with the help of which the driver quality can be understood. The development of an end-to-end system to detect the fall/accident event and notify the nearest local hospitals is also under planning.