Development Towards a Safer Future: Unveiling Our Energy Efficient mmWave Radar System
In an era where technology is rapidly advancing, road safety remains a critical concern. Enter the development of an energy-efficient mmWave radar system, a groundbreaking project designed to enhance road safety and traffic management, regardless of weather conditions. Here’s a glimpse into how this innovative system is set to transform our roads
Project Objectives: The primary aim of this project is to develop a weather-agnostic, portable, low-power, battery-operated mmWave radar system to enhance road safety and traffic management. The specific objectives include:
- Developing battery-operated mmWave radar hardware and signal processing models/algorithms.
- Creating a system prototype and conducting in-field validation.
Deviations and Adjustments: During implementation, some modifications were necessary:
- The current setup uses a laptop with Robot Operating System (ROS); future versions compatible with Raspberry Pi (RasPi) can improve portability.
- A power bank is currently used; developing a more convenient power source is planned.
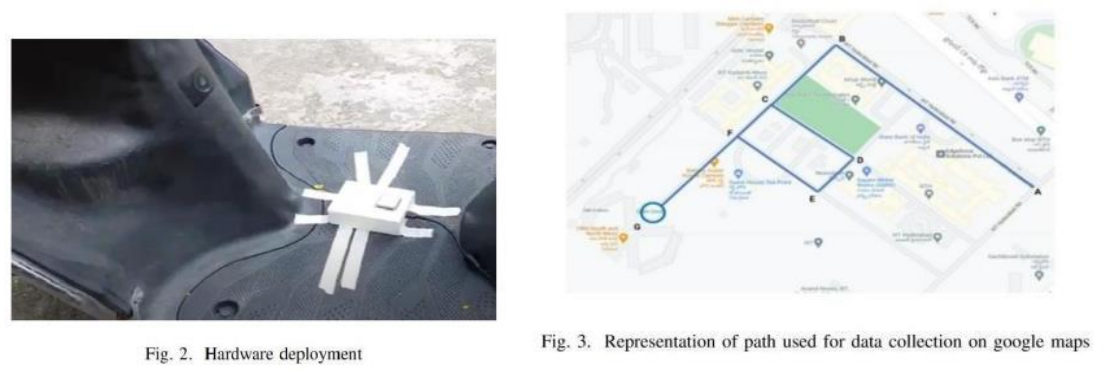
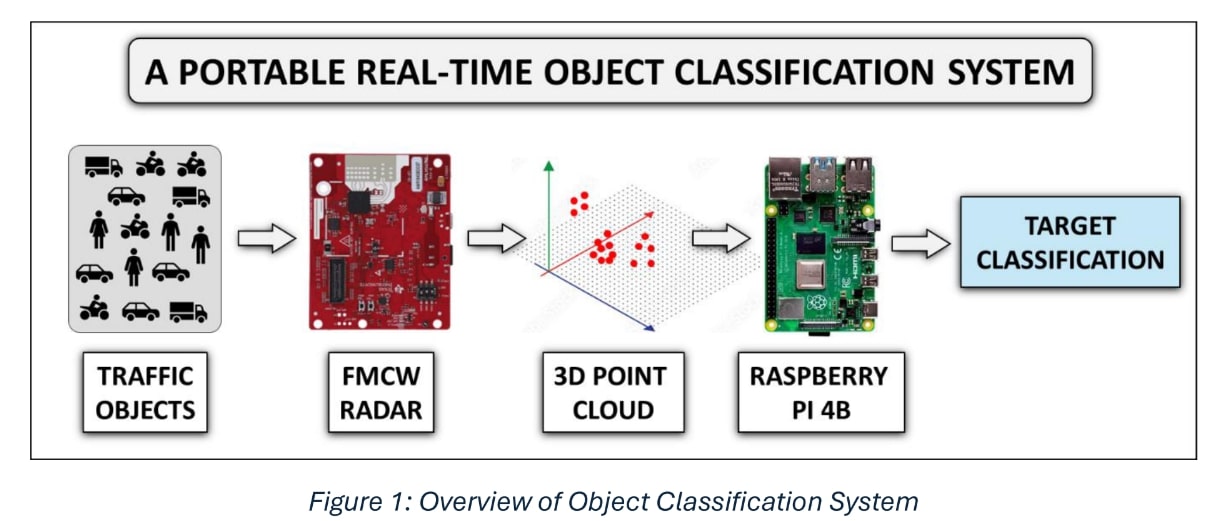
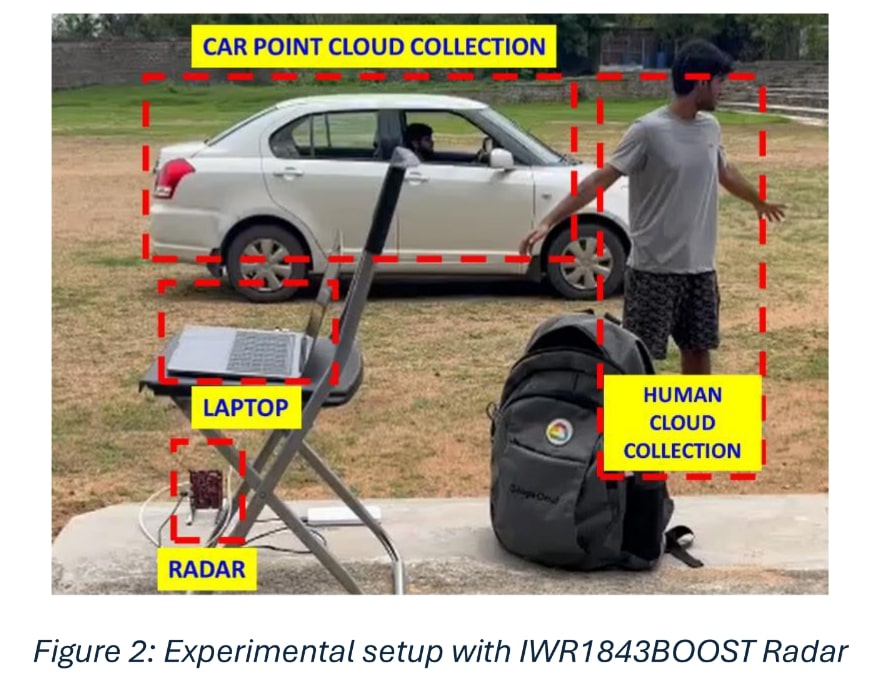
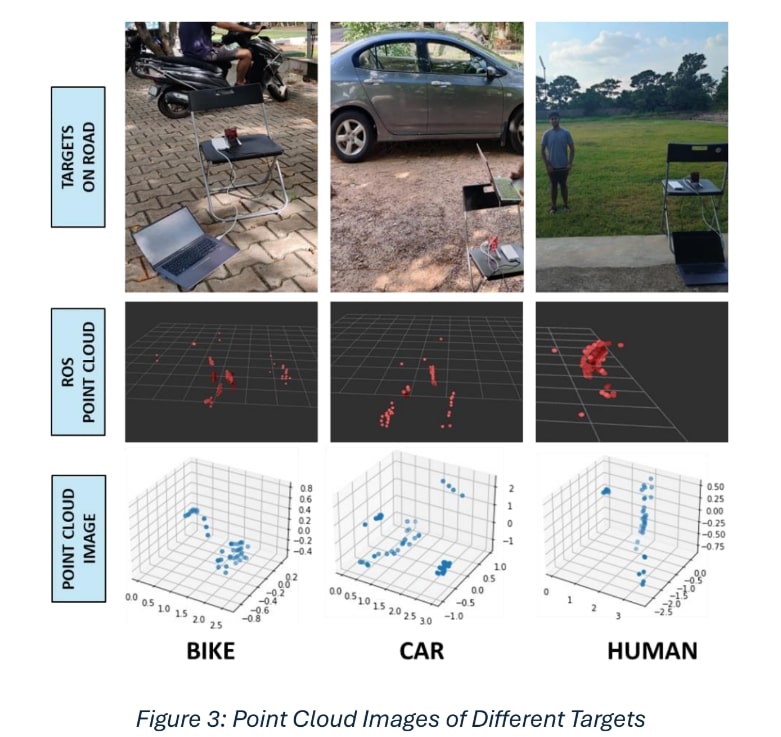
Experimental Work: The experimental setup consists of Texas Instruments' IWR1843BOOST board connected to a platform running ROS for data collection. The radar system is mounted on a tripod about 1 meter above the ground, targeting objects placed in front. Using TI’s mmWave ROS package, 3D point cloud data is extracted from the radar. This data is preprocessed into 3D point cloud images, which train a lightweight Support Vector Machine (SVM) model. The SVM model classifies objects into three categories: 2-wheelers, 4-wheelers, and pedestrians.
Object Classification Pipeline:
- Dataset Statistics: The dataset includes:
- 6032 point cloud images from 39 four-wheelers (SUVs, hatchbacks, and sedans).
- 6479 point cloud images from 45 two-wheelers.
- 3630 point cloud images from 19 pedestrians.
- Training and Evaluation: The gathered dataset trains and evaluates the machine learning models, ensuring robust object classification.
- The developed SVM model requires about 70 MB of memory.
- The system achieves 96% accuracy in real-time classification of pedestrians, 2- wheelers, and 4-wheelers.
- The project has curated a unique dataset of 15,000 point cloud images, available in the public domain.
- The prototype, using TI’s IWR1843BOOST FMCW radar module and Raspberry Pi, demonstrates superior accuracy, lower memory consumption, and higher reliability in poor visibility conditions compared to similar systems.
Results and Contributions: The project introduces a real-time object classification system using mmWave radar sensing and machine learning algorithms, eliminating the need for cameras. The system operates effectively in poor visibility conditions, which often hinder camera-based systems. The proposed pipeline, based on mmWave radar’s point cloud data, integrates ROS to minimize hardware and acquire point cloud data efficiently. A combination of SVM and Principal Component Analysis (PCA) was adopted for low-memory, high-accuracy implementation on portable platforms.
Key Achievements:
Future Work:The project plans to expand the classification capabilities to include buses and trucks. Additionally, future enhancements will involve calculating the distance and velocity of the identified objects to further improve road safety applications.
Authors : Pranjal Mahajan, Dr. Abhishek Srivastava and Dr. Ravi Kiran S.